ОБЩИЕ СВЕДЕНИЯ О СИСТЕМЕ АПЧ
Эффективность работы ДРЛ во многом зависит от постоянства промежуточной частоты приемника (fпр = fг-fс ≈ fг-fмг). Если в процессе работы ДРЛ промежуточная частота, получаемая в результате преобразования, будет заметно отклоняться от своего номинального значения (29 МГц), это может резко снизить его усиление отраженных сигналов. При этом ухудшается отношение сигнал/(шум + помеха), а следовательно, и дальность действия ДРЛ, точность определения координат.
Система АПЧ в ДРЛ предназначена для поддержания номинального значения промежуточной частоты (fпр.о=29 МГц), которая является разностной частотой между частотой передатчика мг и частотой гетеродина г. Так как частота колебаний гетеродина стабилизируется кварцевыми генераторами, то можно считать, что уход промежуточной частоты связан в основном с уходом частоты передатчика. Дестабилизирующими факторами, вызывающими уход частоты магнетронного генератора ДРЛ-6М2 является:
- изменение питающих напряжений;
- изменение параметров колебательной системы;
- изменение величины и характера нагрузки магнетронного генератора; изменение атмосферного давления, температуры, влажности и т.п.
Анализ дестабилизирующих факторов показывает, что все они являются медленно изменяющимися, поэтому и скорость ухода частоты генератора будет небольшой. Быстрые уходы частоты генератора, связанные с резкими изменениями питающих напряжений, происходят сравнительно редко.
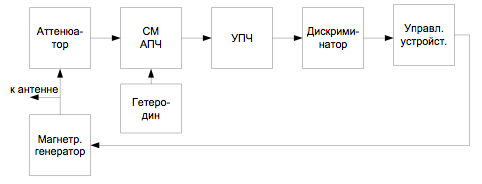
Наличие режима СДЦ в ДРЛ предъявляет дополнительные требования к стабильности частоты передатчика. В режиме СДЦ необходимо навязать фазу зондирующего импульса, генерируемого магнетронным генератором, на время равное периоду повторения когерентному гетеродину. В схеме, приведённой на рисунке 4.10, для подстройки частоты используется небольшая часть мощности зондирующих импульсов, подаваемая непосредственно от магнетронного генератора (МГ) через направленный ответвитель и аттенюатор (АТТ). Схема имеет отдельный смеситель и УПЧ для канала АПЧ.
Изменение частоты МГ можно осуществлять с помощью электромеханической или электронной подстройки. Однако электронная перестройка магнетрона (путем изменения анодного напряжения магнетрона) позволяет изменить частоту в небольших пределах. Кроме того, при такой перестройке изменяется коэффициент полезного действия (КПД) МГ и мощность генерируемых сигналов. Поэтому в ДРЛ-6М2 перестройка осуществляется электромеханическим путем с помощью электродвигателя. Достоинством электромеханической системы АПЧ является возможность изменения частоты МГ в больших пределах. Недостаток – большая инерционность, не высокая точность подстройки (δf=100 кГц).