ФУНКЦИОНАЛЬНЫЕ СХЕМЫ ПЛАТ БОИ-М
Плата дешифратора
Плата дешифратора (ПД) (рисунок 7.13) является одной из основных из пяти плат УД, структурная схема взаимодействия между которыми приведена на рисунке 7.12. Она обеспечивает декодирование всех видов ответных сигналов.
В качестве источников тактовых импульсов в БОИ-М используется генератор на 8 МГц в плате дешифратора. При этом он могут использоваться как с частотой 8 МГц, так и с частотой 4 МГц после прореживания в делителе на 2. Формирователями Ф1 и Ф2 обеспечивают формирование тактовых импульсов по длительности и амплитуде. Контакты ТЕСТ К1 и ТЕСТ К2 – технологические, для выполнения контроля работы генератора. Управление ПД выполняется импульсами "Запуск" и "Запуск дешифратора". Схема привязки обеспечивает привязку поступающих на декодирование с приемника НПО-65 ответных видеосигналов (ВС КОММУТ.) к тактовым импульсам 4 МГц. Формирователь длительности нормализует импульсы по длительности до 1 мкс. При этом их нормализация по амплитуде ранее была выполнена в плате входных сигналов. В качестве линии задержки с отводами используется 100 – разрядный сдвигающий регистр. максимальное время задержки в регистре – 25 мкс. Этой задержки достаточно для декодирования всех возможных координатных и ключевых кодов. Для декодирования ключевых кодов дополнительно используется видеосигнал декодированной координаты (ДК), очищенный от несинхронных импульсных помех ОДКЗ – очищенная декодированная координата задержанная с платы синхронизации. Для того, чтобы дешифрировать коды, соответствующие данному режиму запроса в плату дешифратора подаются стробы БН и ТИ, коммутируемые в соответствии с признаком запросного кода. Дешифрирующие сборки цифровых символов информационных слов "1" и "0" выполняют кроме декодирования выравнивание во времени цифровой информации в циклах БН и ТИ. Дешифраторы кодов "Опознавание" и "СОД" включаются в работу по сигналам от кнопки ОПОЗНАВАНИЕ на ПКУ (на ручке пульта оперативного управления антенн) и включения тумблера ВКЛ. СОД на передней панели БОИ-М.
Декодированные координатные импульсы объединяются на схеме ИЛИ и поступают в виде сигнала "Координата общая" (КО) на плату очистки от НИП. Общая задержка этих координатных кодов в цепях дешифрации такова, что сигнал КО во всех случаях совпадает с моментом импульса "Нулевая дальность", то есть импульсом запуска развертки. Кроме того, каждый из декодированных сигналов по раздельным цепям поступает на плату синхронизации.
Декодированные ключевые импульсы, как и координатные коды, приведены к единому времени за счет соответствующих задержек в ПД.


Плата очистки
Функциональная схема платы очистки (ПО) приведена на рисунке 7.14, а временные диаграммы, поясняющие принцип работы – на рисунке 7.15. Плата обеспечивает работу схемы очистки от НИП и ХИП. При этом устройства задержки импульсных сигналов на Ти или 2Ти находятся в ПО, а схема логического перемножения в соответствии с логиками 2/2 или 3/3 – в плате синхронизации. Такие помехи создаются как постановщиками помех, так и самолетными ответчиками, когда они отвечают на запрос одной РЛС, а сигналы принимаются другой РЛС, работающей с другой частотой повторения. Задержка сигналов выполняется в двух матрицах накопителей в интегральном исполнении. Точность запоминания временного положения импульсов составляет 2 мкс и определяется частотой повторения последовательности МЕТКИ Н, равной 500 кГц. То есть вся дальность действия ДРЛ разбивается на временные дискреты (кванты дальности) равные 2 мкс (это соответствует дальности ∆Д=300 м). Количество временных дискретов – 768, что соответствует временному интервалу 768х2=1536 мкс.
Сигнал КО с платы ПД поступает на схему привязки к импульсам начала считывания (НС). При логике очистки 3/3 сигналы в матрице накопителя 1 задерживаются на Ти, в матрице накопителя 2 – еще на Ти. При этом схема задержки на 1 разряд обеспечивает возможность использования одного и того же счетчика адреса для первой и второй матриц накопителя. Импульсы начала считывания следуют с периодом 2 мкс. В следующем периоде повторения по сигналам "Запись" в матрицу 1 поступят новые импульсы, а информация предыдущего зондирования перепишется в матрицу 2 через схему задержки на 1 разряд. Одновременно сигналом "Считывание" формируется сигнал "Строб 1", являющийся аналогом задержанного на Ти импульсного сигнала КО. В следующем периоде повторения вышеперечисленные процессы повторяются, при этом аналогом задержанного на 2Ти импульса КО будет сигнал "Строб 2".


В ПО организован встроенный автоматический контроль исправности матриц накопителей. С этой целью в ПО поступают импульсы контроля ИК1 и ИК2. С помощью сигнала Траб, длительностью 6…7 мкс, в схеме привязки осуществляется коммутация сигналов КО и ИК1, то есть вместо сигнала КО после излучения зондирующего импульса используется ИК1. Устройство контроля 1 проверяет правильность записи ИК1, задержки на Ти в матрице накопителя 1 и совпадения его в первом и втором периодах зондирования. При этом ИК2 не должен совпадать с сигналом ИК1. Устройство контроля 2 проверяет совпадение ИК1 в первом и третьем зондированиях, а также несовпадение ИК1 и ИК2. Таким образом, после каждого зондирующего импульса, на интервале дальности примерно до 1 км сигналы КО в плате ПО не очищаются от НИП. Сигналы "Неисправность 1" или "Неисправность 2" указывают, что неправильно функционирует накопитель 1 или накопитель 2. Если неисправен накопитель 2, то в плате синхронизации ПС будут использоваться только сигналы "Строб 1", если накопитель 1, то выходные сигналы со схемы привязки поступают через переключатель П (устанавливается по команде НЕИСПРАВНОСТЬ 1 в нижнее положение) на матрицу 2, в плате ПС будет использоваться только "Строб 2". Если неисправны оба накопителя, то по сигналам "Неисправность 1" и "Неисправность 2" плата ПС начинает пропускать сигналы КО без очистки.
Плата синхронизации
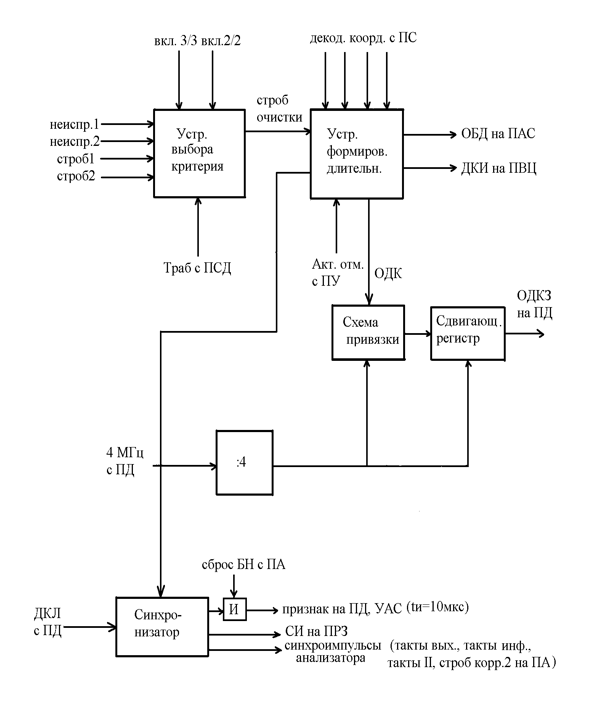
Функциональная схема платы синхронизации (ПС) приведена на рисунке 7.16. На устройство выбора критерия очистки от НИП поступают команды ВКЛ. 2/2 или ВКЛ. 3/3, а также сигналы неисправности платы очистки НЕИСПР.1 и НЕИСПР.2. В соответствии с этими сигналами и командами устройство выбора критерия коммутирует сигналы ПО "Строб 1" и "Строб 2". При этом устройство выбора критерия дополнительно стробируется импульсами Траб. С целью подавления контрольных импульсов ПО на формирователь длительности поступают сигналы декодированных координат с ПД и строб очистки. Последний формируется из импульсов либо "Строб 1" (критерий 2/2), либо "Строб 1" (критерий 3/3).
При поступлении одновременно сигналов "Неиспр.1" и команды 2/2 прохождение сигнала "Строб 1" запрещается и разрешается прохождение сигнала "Строб 2". То есть при возникновении одной неисправности устройство очистки продолжает работать по критерию 2/2.
Выходные сигналы устройства формирования длительности – очищенное бедствие (ОБД) и декодированная координата (ДКИ) поступают на ИКО. Кроме того, очищенная декодированная координата (ОДК) через схему привязки к тактовым импульсам и сдвигающий регистр в виде ОДКЗ (ОДК задержанная) поступает на ПД.
Длительность отметки ОБД больше, чем ДКИ. Длительность ДКИ и ОБД выравниваются при включении тумблера (на ПУ БОИ-М) АКТ ОТМ. Необходимо отметить, что как ОБД, так и ДКИ при очистке по критерию 2/2 задерживаются на Ти, а по критерию 3/3 – на 2Ти, внося незначительную ошибку в оценку измерения угловых координат.
Частота тактовых импульсов выбрана максимальной и составляет 1 МГц. Синхронизатор запускается декодированными ключевыми импульсами (ДКЛ), то есть в моменты начала поступления цифровой информации. С выходов синхронизатора снимаются импульсы: "Такты инф", "Такты вых", "Такты II", "Такты корр 2", поступающие в плату анализа. Сигналы "Признак" и синхроимпульсы информации (СИ) используются в БОИ-М для обработки цифровой информации.
Плата анализатора
Функциональная схема платы анализатора (ПА) приведена на рисунке 7.17. Плата анализатора обеспечивает поиск (обнаружение) ошибок, которые возникают при передаче цифровой информации, автоматическое исправление простейших из них.
На сдвигающие регистры "0" и "1" поступают цифровые "0" и "1" из ПД. При этом временное совпадение цифровой информации в циклах БН и ТИ обеспечивается в ПД.
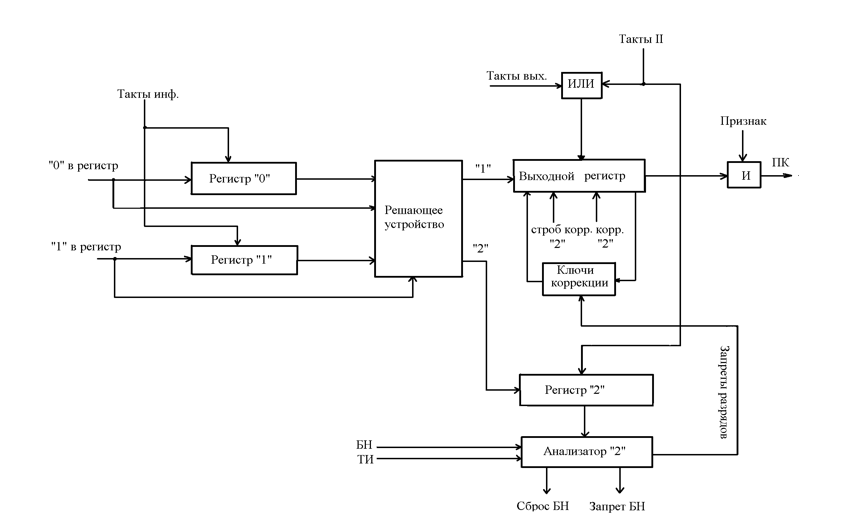
Сигнал "Такты инф", поступающие с ПС, продвигает информацию "0" и "1" по регистрам. Количество разрядов в регистрах равно 21, поэтому первый разряд первого слова появляется на выходе (в 21-м разряде регистра), когда первый разряд второго слова поступил на вход (в первый разряд). С момента поступления первого разряда второго слова цифровой информации на решающее устройство поступают сведения о заполнении обеих позиций (0 и 1) каждого разряда в обоих словах. Анализируя две позиции разряда первого слова и две позиции второго слова, решающее устройство принимает решение, какой же сигнал имеется (0 или 1) в данном разряде. В таблице 7.2 приведены все возможные варианты входных сигналов и отклики решающего устройства на них. Решающее устройство обеспечивает обнаружение и исправление однократных и только обнаружение двукратных ошибок. Истинные комбинации таблицы 7.2 №№ 6 и 11. Однократная ошибка – это пропуск одного из входных импульсов или появление одного лишнего импульса на позиции. Такую ошибку решающее устройство легко обнаруживает и исправляет (2, 3, 5, 9, 12, 14 и 15 строчки таблицы 7.2). Выходные сигналы появляются на выходе "1". Двукратная ошибка – пропадание двух импульсов или появление двух лишних импульсов, а также одновременное пропадание одного импульса и появление другого. Такую ошибку можно обнаружить, но исправить ее нельзя. В этом случае выходные сигналы формируются на выходе "2" для данного разряда информации (1, 4, 7, 8, 10, 13 и 16-я строчки таблицы 7.2). Выход "1" решающего устройства подключен к выходному регистру, который запоминает все 20 разрядов цифровой информации. Выходной последовательный код (ПК) цифровой информации через схему "И" поступает в устройство автоматического сопровождения. В регистр "2" (регистр двукратных ошибок) поступает информация с выхода решающего устройства "2". Этот регистр запоминает в каких разрядах информационного слова имеются двукратные ошибки. Запись информации в выходной регистр и регистр "2" начинается по командам ТАКТЫ П, а заканчиваются в момент поступления на вход ПА 20-го разряда второго информационного слова.

После этого проводится анализ двукратных ошибок и коррекция содержимого выходного регистра в следующем порядке. Если двойная ошибка (далее используем символ "2") получена в режиме БН, то необходимо знать, в каком она разряде. Если "2" получена в разрядах старших двух цифр бортового номера, то есть в двух последних декадах, то информация проходит на выход ПА. Формируется сигнал "Запрет БН", запрещающий ввод данного БН в режим автосопровождения, но не препятствующий сравнению данного бортового номера по трем младшим цифрам (если цель ранее была уже взята на автосопровождение). Если же "2" принадлежит младшим трем цифрам бортового номера, то есть находится в первых трех декадах, то формируется сигнал "Сброс БН", запрещающий появление сигнала "Признак" на выходе платы синхронизации. При этом не формируется сигнал "Такты вых" и информация выходного регистра на выход платы ПА не поступает. Если "2" получена в режиме ТИ, то анализатор принимает следующие решения:
- Ошибка в первой декаде (1…4-й разряды), которая несет информацию о десятках метрах высоты. В этом случае цифра десятков метров обнуляется.
- Ошибка в 5…15-м разрядах, где передается информация о сотнях, тысячах, десятках тысяч метров высоты. В этом случае все цифры высоты обнуляются.
- Ошибка в 15-м разряде, где передается признак относительной, абсолютной высоты. В этом случае значения высоты также обнуляются.
- Ошибка в 16-м разряде, в котором передается информация "Бедствие". В этом случае принимается решение, что сигнал "Бедствие" отсутствует.
- Ошибка в 17…20-м разрядах, которые передают информацию остатка топлива. В этом случае информация об остатке топлива обнуляется.
По сигналу "Сброс корр 2" выходной регистр переводится в режим коррекции, а по сигналу "Корр 2" выполняется коррекция цифровой информации (обнуление соответствующих разрядов). Как и ранее, скорректированная информация через схему И последовательным кодом выводится в устройство автоматического сопровождения. Управление выходным регистром в этом случае выполняется импульсами "Такты вых" Важно отметить, что обработка (анализ) цифровой информации в ПА ведется 320 мкс, а перепись ее ПК выполняется всего 10 мкс.
Устройство автоматического сопровождения
Устройство автоматического сопровождения (УАС) предназначено для автоматического сопровождения ответных сигналов по координатам (дальности, азимуту) и высоте от шести самолетов. Ввод УАС в режим автосопровождения выполняется оператором одним из трех способов:
- Набором на клавиатуре пульта ПУ известного бортового номера (БН) самолета.
- С помощью шарового датчика координат.
- Автовводом.
Устройство УАС содержит шесть идентичных каналов, каждый из которых предназначен для автоматического сопровождения информации от одного самолета. Функциональная схема одного из шести каналов сопровождения приведена на рисунке 7.18.
Канал АС состоит из трех плат: платы бортового номера (ПБН), платы регистра дальности (ПРД), платы текущей информации (ПТИ).
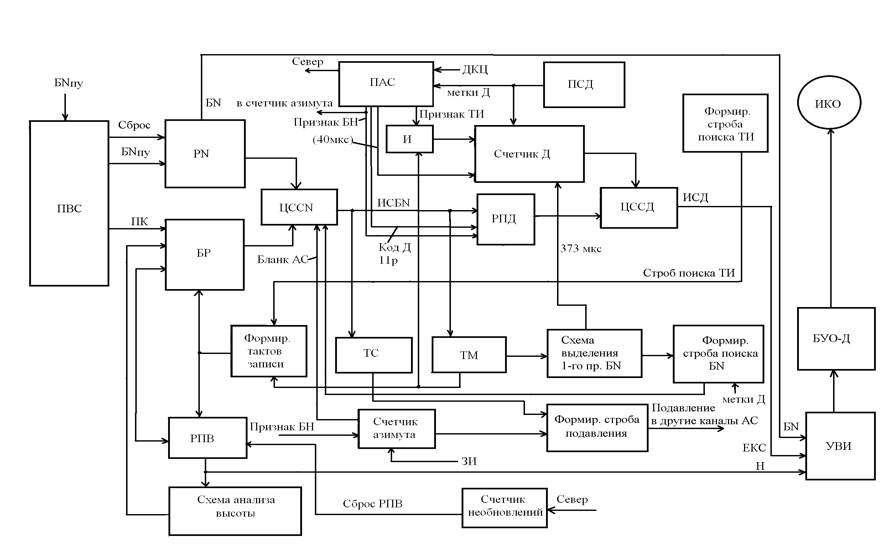
Рассмотрим функционирование канала АС при вводе цели в автосопровождение набором известного БН. Работу канала АС можно представить совокупностью процессов обработки информации (сигналов). Функционирование канала АС можно описать совокупностью пяти процессов (П) обработки сигналов в платах канала АС в приведенном ниже виде.
- Обозначение П – Р1.
- Название Р1 – целеуказание.
- Назначение Р1 – обеспечить постановку задачи на поиск цели с данным (с ПУ) бортовым номером (БНпу).
- Начало Р1: Набор оператором на пульте управления БОИ-М пятизначного бортового номера цели, дополнительную информацию о которой необходимо получить (предварительно нажимается клавиша N).
- Содержание Р1:
- Ввод цифрового кода БНпу в регистр номера (РN) платы бортового номера.
- Отображение БНпу на ИКО в первой строке формуляра автосопровождения цели (БN из РN через УВИ поступает на ИКО).
- Конец Р1: набор оператором последней (пятой) цифры БНпу.
- Обозначение П – Р2.
- Название Р2 – поиск цели.
- Назначение Р2 – поиск цели с заданным БНпу.
- Условие осуществления Р2 – наличие в просматриваемой зоне обзора диспетчерского радиолокатора цели с заданным БНпу и передача им ответных сигналов.
- Начало Р2 – набор последней цифры БНпу на ПУ.
- Содержание Р2:
- Запись в буферный регистр (БР) последовательным кодом (ПК) бортовых номеров воздушных судов, попавших в зону обзора и отвечающих на запрос ДРЛ.
- Сравнение БНпу, записанного в регистр номера (РН) с поступающими в составе ответных сигналов бортовыми номерами целей (Бнц). Бнц поступают из буферного регистра, а сравнение номеров осуществляется на цифровой схеме сравнения номера (ЦССN).
- "Захват цели" (установление факта совпадения номеров) как результат появления на выходе ЦССN импульса сравнения бортового номера (ИСБN).
протекающие процессы в УАС отобразим на ИКО (рисунке 7.19.)
- Конец Р2: запись в регистр памяти дальности (РПД) дальности обнаруженной цели. Импульс ИСБN обеспечивает фиксацию состояния РПД, а значит и запоминание дальности до выбранной цели. 11-й разрядный код дальности поступает на РПД со счетчика разрядов дальности платы ПАС.
- Обозначение П – Р3.
- Название Р3 – сопровождение цели (маркирование).
- Назначение Р3 – считывание текущей информации соответствующей цели, взятой на сопровождение.
- Начало Р3: захват цели на автосопровождение, то есть появление ИСБN с приходом из ПАС ПРИЗНАК БN. Последний формируется в момент прихода из ДУ ДКЦ.
- Содержание Р3:
- Срабатывает триггер сопровождения (ТС), что свидетельствует о наличии цели с заданным Бнц в зоне обзора, и одновременно запрещается запись его в другие каналы автосопровождения (вырабатывается сигнал ПОДАВЛЕНИЕ в формирователе стробов подавления).
- Запускается стартстопный счетчик азимута, который просчитывает ЗИ, поступающие из платы ПАС (после прихода сигнала ПРИЗНАК БN).
- Взводится триггер маркирования (ТМ), который закрывает путь прохождению тактовых импульсов в БР (сигналом "Режим М" через формирователь тактов записи). Тем самым исключается запись информации от других ВС в течение времени прихода от самолетного ответчика ответных сигналов. Это время соответствует 32 периодам повторения зондирующих сигналов ДРЛ. Сброс триггера ТМ произойдет через 32 зондирования по сигналу счетчика азимута. Счетчик азимута задает время работы ЦССN в течение 32 зондирований.
- Формируется "Строб поиска ТИ". Для чего:
- в счетчик дальности записывается опережение в 15 мкс по разрешающему сигналу ТМ и импульсу "Признак ТИ2". Это обеспечивает срабатывание схемы сравнения дальности ЦССД и появление импульса сравнения дальности (ИСД) за 15 мкс до появления импульса "Признак ТИ" цели;
- формирователь строба поиска ТИ по ИСД сформирует "Строб поиска ТИ" (длительностью 10 мкс).
- Разрешается запись ТИ цели в БР и перепись ее в регистр памяти высоты (РПВ) стробом поиска ТИ.
Выдается информация о высоте цели через устройство выдачи информации (УВИ) на ИКО во вторую строку формуляра (по запросам блока управления отображением).

Таким образом первичный съем текущей информации закончен и в формуляр на ИКО записаны высота цели и остаток топлива.
- В следующем зондировании, при котором будет получен ответ на запрос БН, срабатывает по разрешающему потенциалу ТМ схема выделения “Первого признака БN”.
- В счетчик дальности записывается упреждение в 373 мкс, что необходимо для привязки импульса ИСД к импульсу ДК предыдущего зондирования, а значит, и получения единого сигнала (ЕКС).
- Срабатывает схема ЦССД в момент времени соответствующий импульсу ДК предыдущего зондирования (режима БН) и выделяется ЕКС.
Этой операцией заканчивается съем ТИ в первом обзоре ДРЛ.
- Счетчик азимута (через 32 зондирования) сбросит триггер ТМ (через схему ЦССN), который разрешит запись новой информации в БР данного канала.
Конец Р3: Счетчик азимута формирует сигнал "Бланк АС" для запирания схемы ЦССN. Длительность бланка на 10-200 меньше по азимуту зоны обзора ДРЛ ( равна 340о-350о). Закономерности первого периода обзора ДРЛ (времени реализации процессов Р1, Р2, Р3):
- В зоне обзора ДРЛ обнаружена цель, бортовой номер которой совпадает с номером, выбранным оператором на ПУ. - Дальность до этой цели записана в РПД. - Высота цели и остаток топлива записаны в РПВ и выданы в формуляр сопровождения на ИКО ДРЛ. - Получен единый координатный сигнал цели и выдан на ИКО. - Закрыт данный канал автосопровождения до следующего обзора (для исключения его срабатывания по сигналам боковых лепестков Ао).Далее следуют процессы второго периода обзора ДРЛ.
Обозначение П – Р4.
- Название Р4 – поиск цели на известной дальности.
- Назначение Р4 – обнаружить цель с известным БН на известной дальности.
- Сущность Р4: создать "движущееся окно" (движущийся "Строб поиска БN"). Размеры "окна" по азимуту должны быть равны ширине диаграммы направленности антенны ДРЛ, а по дальности – 15,6 км (начало за 6 км до цели и конец – за 9,6 км от цели).
- Начало Р4 – появление сигнала конца "Бланка АС", что обеспечивает открывание ЦССN для выработки ИСБN.
- Содержание Р4:
- Счетчик дальности устанавливается с упреждением в 40 мкс по сигналу "Признак БN" с ПАС. - Формируется "Строб поиска БN" в счетчике дальности. Длительность строба поиска 64 мкс, выбрана таким образом, чтобы при всех возможных скоростях движения самолет не мог выйти за его пределы в течение одного обзора ДРЛ. - Дается разрешение ЦССN на анализ поступающих БN в "движущемся окне". - Конец Р4 – захват цели (появление ИСБN на выходе ЦССN).
- Особенности Р4:
- Если нового захвата не произошло, то поиск цели продолжается весь период обзора.
- Если цель не обнаружена в течение трех периодов обзора ДРЛ, то: а) счетчик необновлений, просчитывающий импульсы "Север" (поступают из платы ПАС), разрешит поиск цели на всей дальности и обнуляет РПВ (стирается информация о высоте в формуляре ИКО); б) работа канала автосопровождения начинается сначала. Обозначение П – Р5. Название Р5 – сопровождение цели в следующем обзоре (маркирование). Назначение Р5 – обновить информацию о дальности и высоте полета во втором обзоре (при нормальном, без потери цели, сопровождении). Начало Р5 – “захват цели” с заданным БНпу (по аналогии с первым обзором). Содержание Р5 – аналогично процессу Р3 первого обзора, за исключением следующих отличий:
- С появлением ИСБN формируется "Строб подавления" вокруг отметки цели длительностью 80 мкс по дальности, который служит для исключения возможности ввода одной и той же цели одновременно в несколько каналов автосопровождения. Строб подавления представляет собой импульс, появляющийся в каждом зондировании с момента начала процесса "Поиск" (Р2), заканчивается 128-м зондированием. Строб подавления запрещает ввод информации в другие каналы АС.
- Высота в РПВ обновляется после сравнения с предыдущей (записанной в предыдущем обзоре) в том случае, если разность высот не превышает 800 м. Тем самым осуществляется дополнительная селекция целей по высоте схемой анализа высоты.
- Конец Р5:
- Обновляется информация в РПД и в РПВ с их выдачей на ИКО в формуляр цели.
- Включается режим бланкирования канала АС до следующего режима "Поиск".
- Закономерности Р4 и Р5:
- Процессы поиска цели на уже известной дальности и захват цели повторяются в каждом новом обзоре, обновляя информацию о цели (рисунок 7.19).
- Прекращение автосопровождения цели осуществляется по желанию оператора нажатием клавиши номера сопровождающего канала (I, …, VI) на ПУ.
В режиме ввода БОИ в режим автосопровождения от шарового датчика или автовводом, работа канала отличается только тем, что БN в регистр номера записывается не в пять приемов по одной цифре, а в один прием из ПВС.
Устройство выдачи информации
Функциональная схема устройства УВИ представлена на рисунке 7.20. Устройство УВИ предназначено для расшифровки кодов опроса, поступающих с блока БУО-Д, осуществления сбора информации с каналов устройства автоматического сопровождения и выдачи информации в соответствии с кодами опроса в блок БУО-Д. Основными узлами УВИ являются:
- дешифраторы каналов;
- дешифратор декад;
- коммутаторы каналов;
- шифратор ЕКС;
- ключи формирования импульса разрешения отображения (ИРО).
С блока БУО-Д поступают следующие сигналы опроса:
- сигналы номера опрашиваемого канала "Опрос канала 1р" – "Опрос канала 3р", представляющие собой трехразрядные параллельные коды;
- сигналы номера опрашиваемой декады "Опрос декад 1р" – "Опрос декад 4р", представляющие собой четырехразрядные параллельные двоичные коды.
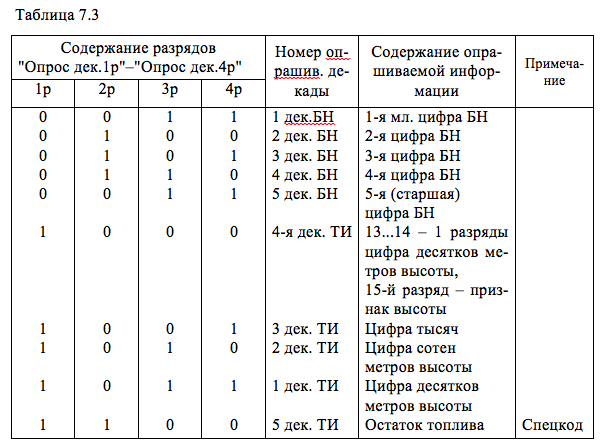
Содержание информации опрашиваемой сигналами "Опрос декад 1р" – "Опрос декад 4р", представлено в таблице 7.3.
В соответствии с этими сигналами опроса в цепи выдачи информации "ССД 1р" – "ССД 4р" обеспечивается подключение опрашиваемой декады опрашиваемого канала. Дешифратор каналов имеет шесть выходных цепей, каждая из которых соответствует сигналу опроса одного из каналов. Дешифратор декад имеет десять выходных цепей, каждая из которых соответствует сигналу опроса одной из декад. В соответствии с выходными сигналами дешифраторов декад и каналов, коммутатор каналов распределяет сигналы опроса в 6 цепей, каждая из которых соответствует опросу определенной декады определенного канала. Для сбора информации о декадах с регистров БН и ТИ всех каналов в устройстве УВИ применены схемы ИЛИ, то есть осуществляется способ объединения сигналов на общем соединительном проводе. На каждой из восьми цепей объединяются выходы соответствующего разряда опрашиваемой декады БН и ТИ трех каналов. Объединение заканчивается на двухвходовых схемах ИЛИ. с их выходов снимаются сигналы содержания разрядов декады "ССД-1р" – "ССД-4р", поступающие на блок БУО-Д. Для работы блока БУО-Д необходимо также формировать сигналы "ИРО" и "ЕКС". Сигнал "ИРО" формируется для всех занятых каналов опроса любой декады. Для этого все импульсы в ответ на импульс опроса декад с выхода дешифратора декад объединяются по ИЛИ1 в сигнал синхронизатора "СС".
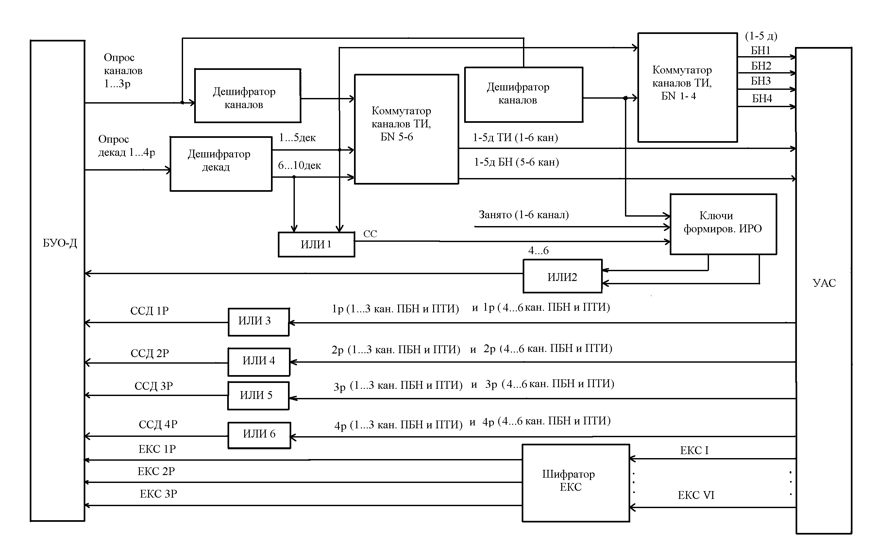
Через ключи формирования сигнала "ИРО", на которых проверяются занятость данного канала, через сборку ИЛИ2 сигналы "СС" поступают в цепь формирования "ИРО". Сигнал "ЕКС" поступает на УАС. В шифраторе ЕКС осуществляется кодирование сигналов шести каналов "ЕКС-I" – "ЕКС-VI" в сигналы "ЕКС-1р"-"ЕКС-3р". Кодирование осуществляется двоичным кодом с целью уменьшения количества связей между блоками БОИ-М и БУО -Д.
Пульт управления
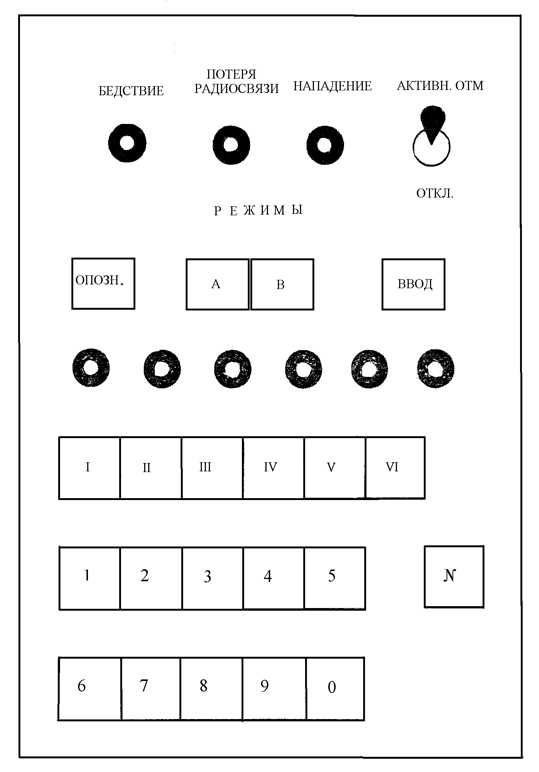
Пульт управления (ПУ) обеспечивает управление блоком БОИ-М и его взаимодействие с другими блоками ДРЛ. Лицевая панель ПУ приведена на рисунок 7.21. С ПУ в БОИ-М поступают следующие команды:
- АВТОВВОД – команда на переход УАС в режим автосопровождения (клавиша ВВОД).
- Включение режима автосопровождения по бортовому номеру (клавиша N).
- Клавиша ОПОЗН. – вывод на ИКО ответных сигналов ОПОЗН.
- Сброс любого из шести каналов автосопровождения (клавиши I – VI).
- Включение АКТ. ОТМ. (отметка от цели расширяется в 2 раза).
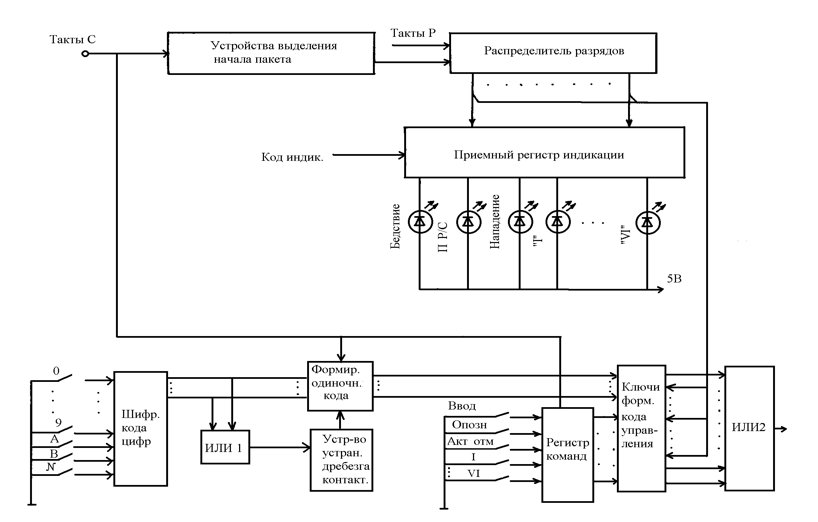
Клавиши А и В в РСП-6М2 не задействованы (международные режимы). Кроме того, при использовании отечественных кодов на ПУ высвечивается прохождение сигналов "Бедствие" ("Потеря радиосвязи" и "Нападение" не используются). Функциональная схема ПУ приведена на рисунке 7.22. Информация на ПУ и с ПУ передается последовательным кодом пакетами. Используется временное уплотнение сигналов, поступающих в БОИ-М. Для временной синхронизации устройств передачи такой информации в ПУ введены устройство выделения начала пакета, распределитель разрядов, управляющих сигналами "Такты С" и "Такты Р".
Сигналы с клавиш цифронаборника "О",…,"9", "А", "В", "N" поступают на шифратор кода цифр, который кодирует цифры в четырехразрядный двоичный код. Через схему ИЛИ1 запускается устройство устранения дребезга контактов, которое формирует бездребезговый импульс команды. Этот импульс разрешает формирователю одиночного кода выдать одиночный код, привязанный во времени к тактовым импульсам ТАКТЫ С. Через ключи-формирователи одиночный код команды поступает в первые четыре разряда кода ПУ. Регистр команд обеспечивает привязку во времени начала и конца команд с клавиш ВВОД, ОПОЗН, I…VI и тумблера АКТ ОТМ к тактовым импульсам ТАКТЫ С. На ключах–формирователях выходные сигналы с регистра команд привязываются к соответствующим разрядам кода ПУ. Приемный регистр индикации обеспечивает хранение пакета информации КОД ИНДИКАЦИИ. По командам с распределителя разрядов соответствующие выходы приемного регистра подключаются к светодиодам БЕДСТВИЕ, I…VI, обеспечивая на ПУ световую индикацию поступивших сигналов.